RViz vs Gazebo in ROS: The Importance of 3D Visualization for Robotics Development


ROS (Robot Operating System) is an open-source framework that provides tools and libraries to help developers build and control robotic systems. One of the most important tools in ROS is RViz, a 3D visualization tool that allows users to visualize robot models, sensor data, and other objects in a virtual environment.
Also Read: Creating & launching world file in Gazebo
In this blog post, we'll explore what RViz is, why it's important, and how it differs from another popular ROS tool, Gazebo.
What is RViz?
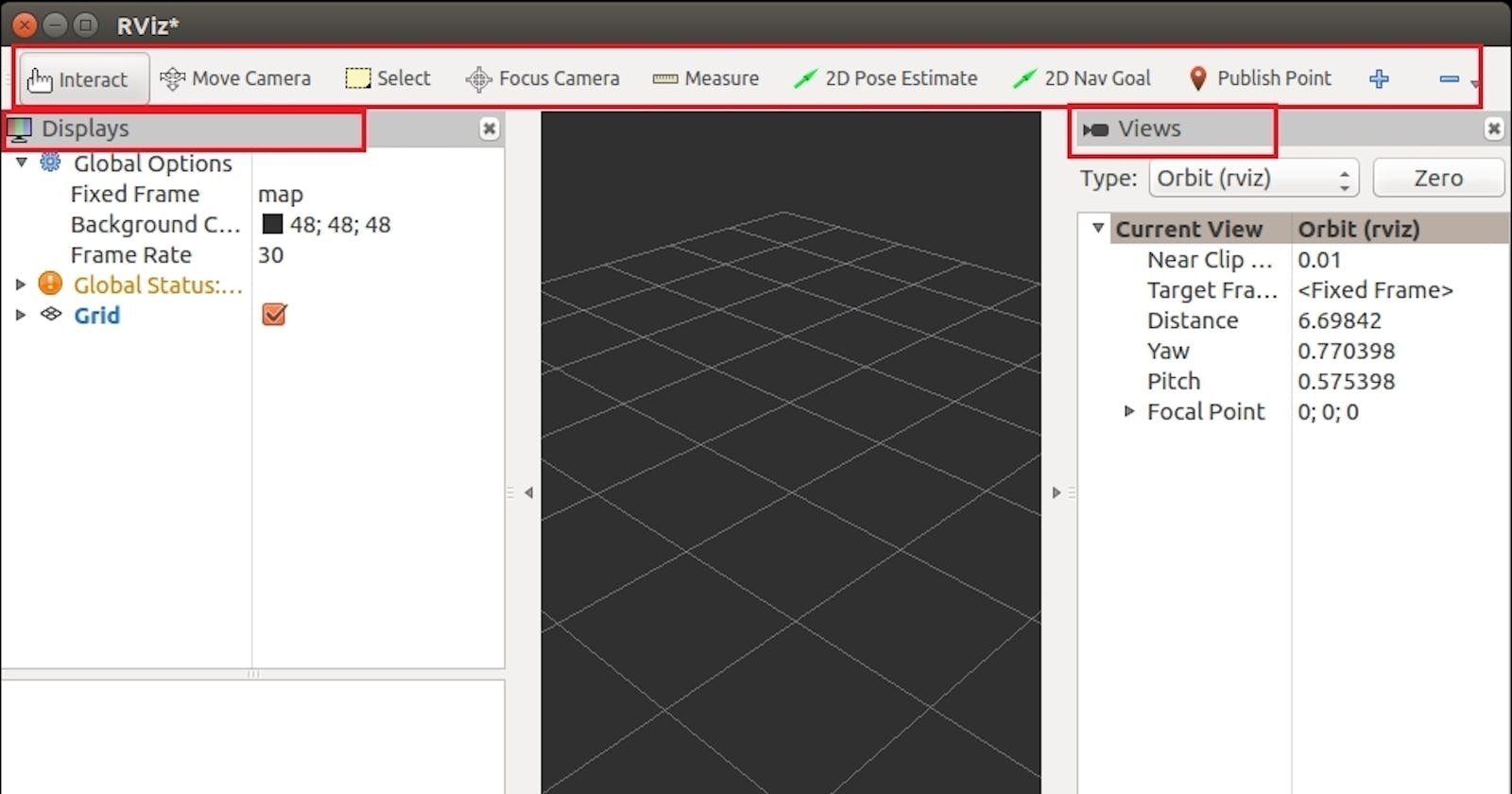
RViz is a powerful 3D visualization tool that is part of the ROS framework. It allows users to visualize and interact with complex robot models and their sensor data in a virtual environment. RViz provides a user-friendly interface that allows developers to visualize and debug their robotic systems, making it an important tool for robot development.
RViz is highly customizable, allowing users to create custom displays to visualize different types of data. It supports a variety of different data types, including point clouds, laser scans, images, and 3D models. RViz also includes built-in support for common ROS message types, making it easy to visualize data from a variety of sensors.
Why is RViz Important?
RViz is an important tool for ROS developers for several reasons. First and foremost, it provides a powerful visualization tool that allows developers to see and interact with their robot models and sensor data in a virtual environment. This makes it much easier to debug and test robotic systems, as developers can see how their robots will behave in different situations.
RViz is also highly customizable, allowing developers to create custom displays to visualize different types of data. This makes it possible to visualize complex data sets in a meaningful way, making it easier to analyze and understand the data being collected by robotic systems.
What's the Difference between Gazebo and RViz?
While both Gazebo and RViz are important tools in the ROS ecosystem, they serve different purposes. Gazebo is a robot simulation environment that allows developers to test and debug their robotic systems in a virtual environment. It simulates the physics of a robot and its environment, allowing developers to test their systems without the need for physical hardware.
RViz, on the other hand, is a 3D visualization tool that allows developers to visualize and interact with their robot models and sensor data in a virtual environment. While RViz can be used in conjunction with Gazebo, it is not a simulation environment in and of itself.
Another key difference between Gazebo and RViz is that Gazebo is designed to simulate the entire robot system, including the physics of the robot and its environment. RViz, on the other hand, is focused primarily on visualization and does not simulate the physics of the robot or its environment.
Conclusion
In conclusion, RViz is an important tool in the ROS ecosystem that provides a powerful 3D visualization environment for robotic systems. It allows developers to visualize and interact with their robot models and sensor data in a virtual environment, making it easier to debug and test robotic systems. While Gazebo is also an important tool in the ROS ecosystem, it serves a different purpose as a robot simulation environment. Together, Gazebo and RViz provide developers with powerful tools to develop and test robotic systems in a virtual environment.