Exploring the joint_state_publisher in ROS: Visualize, Control, and Plan Robot Joints


The Robot Operating System (ROS) has revolutionized the field of robotics by providing a flexible and powerful framework for building robotic systems. One essential component of ROS is the joint_state_publisher, a graphical tool that allows users to visualize and publish joint states for robotic systems. In this blog post, we will explore the role of the joint_state_publisher, its significance in ROS, and how to effectively utilize it.
Also Read: tf view_frames in RViz
What is the joint_state_publisher?
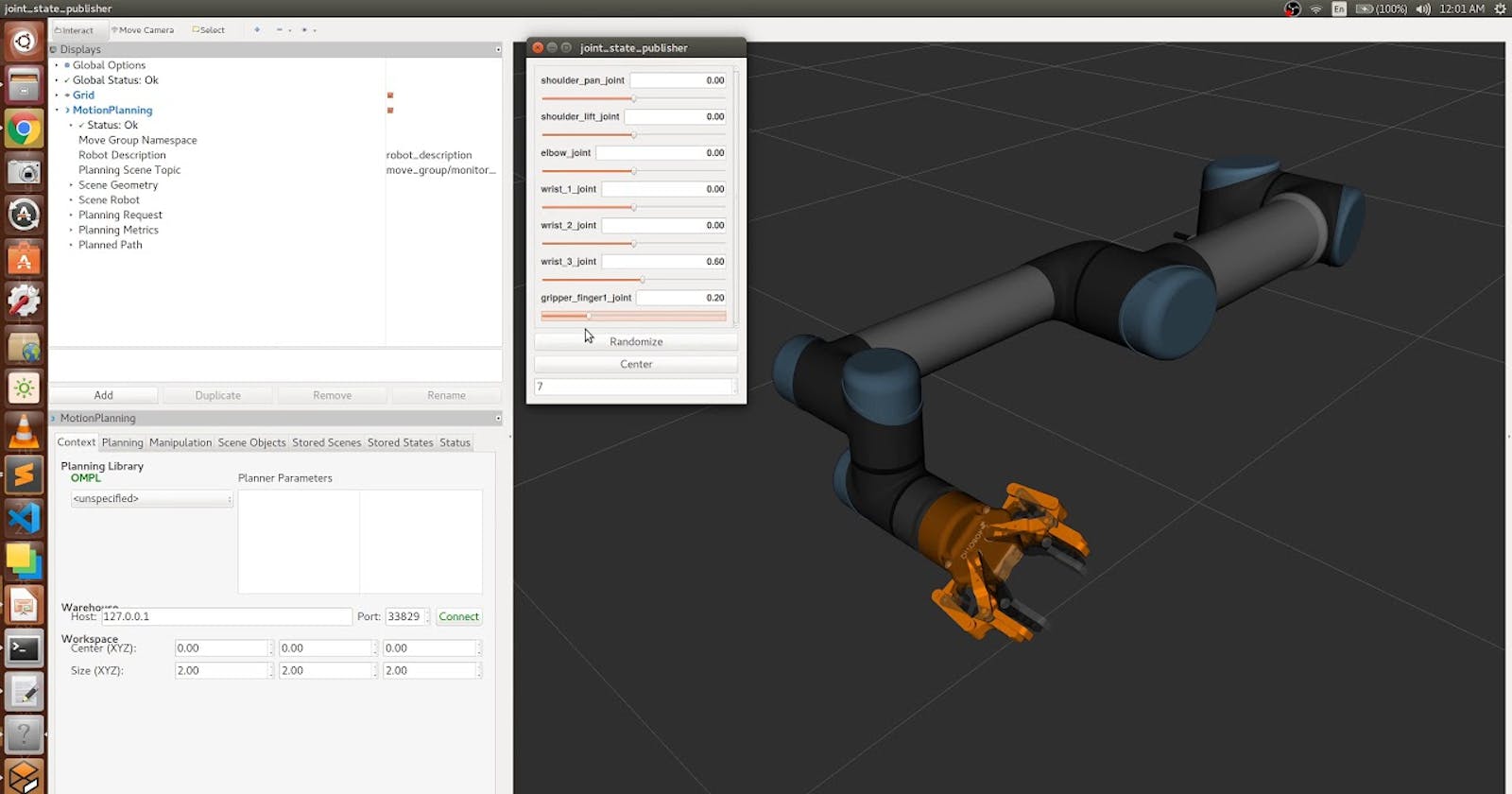
The joint_state_publisher is a valuable ROS tool that enables users to set and publish joint states for robot arms, manipulators, or any articulated system. It provides a user-friendly graphical interface that allows easy visualization and manipulation of joint states. By adjusting the joint state values using sliders or input fields, users can define the positions, velocities, and efforts (torques) of each joint in the system.
Why is the joint_state_publisher important?
The joint_state_publisher plays a vital role in various aspects of robotic systems development and control:
Simulation and Visualization: During robot development and simulation, the
joint_state_publisherhelps to visualize the robot's articulated structure. It allows developers to understand the behavior of the robot by interactively setting joint states and observing how the robot moves and reacts.Robot Control: The
joint_state_publisheris a crucial component in controlling robot arms and manipulators. It provides a convenient way to set desired joint states, allowing for real-time adjustments of positions, velocities, or efforts. By publishing joint state information, it enables other ROS nodes to access and utilize the desired joint states for control purposes.Trajectory Planning: For path planning and trajectory generation, the
joint_state_publisherserves as a valuable tool for previewing and fine-tuning trajectories. By interactively adjusting joint states, developers can evaluate the robot's motion and verify that the planned trajectory aligns with the desired behavior.
How to use the joint_state_publisher?
To make effective use of the joint_state_publisher, follow these steps:
Launch the
joint_state_publishernode: Start by launching thejoint_state_publishernode, either through a ROS launch file or by running the command rosrunjoint_state_publisherjoint_state_publisherin a terminal.Provide the robot description: The
joint_state_publisherrequires the robot's URDF or SRDF to understand the structure and joint information. Make sure to specify the robot description using the robot_description ROS parameter, pointing it to the URDF or SRDF file.Set up joint state values: Once the
joint_state_publisheris running, its graphical interface will be available. Use the sliders or input fields to adjust the joint state values according to the desired positions, velocities, or efforts.Publish the joint states: After setting the desired joint states, click the "Publish" button in the
joint_state_publisher interface. This action publishes the joint states as a ROS message on the /joint_states topic.
By subscribing to the /joint_states topic, other ROS nodes can access and utilize the published joint state information for various purposes, such as control, planning, or visualization.
Conclusion
The joint_state_publisher is an indispensable tool in the ROS ecosystem for setting and publishing joint states of robotic systems. It provides a user-friendly interface to visualize and manipulate joint states, enabling developers to interactively control and observe the behavior of articulated robots. By understanding and effectively utilizing the joint_state_publisher, users can streamline their robotic system development, control, and trajectory planning processes.
Through its integration with other ROS tools and nodes, the joint_state_publisher plays a vital role in bringing robotic systems to life, facilitating tasks such as simulation, control, and trajectory planning. With ROS and tools like the joint_state_publisher, the possibilities for building and controlling advanced robotic systems are endless.